

به گزارش ایسنا و به نقل از تکاکسپلور، پژوهشگران "دانشگاه پنسیلوانیا" (UPenn)، نوعی قایق رباتیک طراحی کردهاند که میتوان از آن برای بررسی اقیانوسها یا انجام دادن عملیات دریایی استفاده کرد. این ربات دریایی ارزان قیمت موسوم به "مودبوت"(Modboat) میتواند تنها با استفاده از یک موتور در آب شنا کند.
"گدالیا نیژنیک"(Gedaliah Knizhnik)، از پژوهشگران این پروژه گفت: ایده اصلی این پروژه، از پژوهشی به دست آمده که در سال ۲۰۱۵ انجام شده بود. از آنجا که در آزمایشگاه من، رباتهای ارزان قیمت مورد بررسی قرار میگیرند، فورا از این ایده استقبال شد. ما تجربه کار با رباتهای دریایی را داشتیم؛ در نتیجه این فرصت خوبی بود تا آن را گسترش دهیم.
هدف بلند مدت این پژوهش، ابداع تعداد قابل توجهی از قایقهای رباتیک است که میتوانند کارها را به صورت گروهی انجام دهند. این پژوهش، نخستین گام در این مسیر به شمار میرود و میتواند به طراحی رباتهای دریایی کمک کند که هم کارآمد و هم مقرون به صرف هستند.

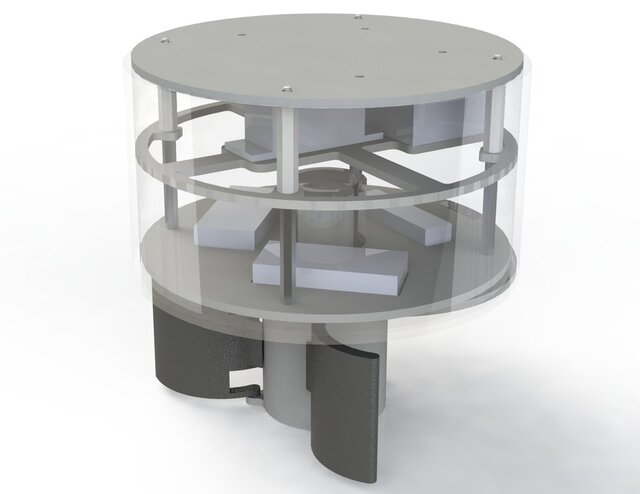
مدبوت، طراحی سادهای دارد و میتواند به صورت موثر به حرکت کردن در آب بپردازد. این ربات، از یک بدنه اصلی و دو باله تشکیل شده و میتواند تنها با استفاده از یک موتور حرکت کند.
هدایت این ربات در یک جهت خاص، با تنظیم سرعت آن امکانپذیر میشود تا بدین ترتیب ربات بتواند بدن خود را به چپ یا راست بچرخاند و یا میزان حرکت بالهها را هنگام شنا تغییر دهد.
نیژنیک ادامه داد: ربات ما، به خوبی رباتهای دیگر شنا نمیکند اما طراحی منحصر به فرد آن فقط با استفاده از یک موتور انجام شده است؛ در صورتی که معمولا رباتها حداقل به دو موتور نیاز دارند. این طراحی موجب میشود که هزینه ساخت ربات، کمتر باشد و امکان تولید تعداد قابل توجهی از آنها فراهم شود. بدین ترتیب، شنای ضعیف رباتها نیز جبران خواهد شد.
پژوهشگران، ربات خود را در مجموعهای از آزمایشها مورد ارزیابی قرار دادند و دریافتند که این ربات میتواند عملکرد خوبی داشته باشد.
نیژنیک افزود: ساخت رباتهای مقرون به صرفه، کمتر امکانپذیر میشود زیرا تجهیزات مورد نیاز برای ساخت آنها، هزینه بالایی دارند. ما در این پژوهش نشان دادهایم که چگونه میتوان طراحی منحصر به فردی را برای ساخت ربات در نظر گرفت تا به ابزاری کاربردی تبدیل شود.
حال که در این پژوهش نشان دادهایم رباتی با این طراحی میتواند به خوبی کار و شنا کند، باید به این فکر باشیم تا آن را در مکانهای مورد نظر خود به کار بگیریم. ما در حال حاضر تلاش میکنیم تا ربات را در مسیرهای خاصی هدایت کنیم و آن را برای وظایفی مانند قرار دادن حسگر و اندازهگیری به کار ببریم.
این پژوهش، در مجله "arXiv" به چاپ رسید.
انتهای پیام





نظرات